
Aerial Photography CUSTOM UAS Drone Sales.
Elevate your aerial photography game with our custom UAS drones! Engineered for precision and performance, our drones deliver breathtaking shots from every angle. Whether you're capturing stunning landscapes or dynamic action shots, our customizable solutions cater to your unique needs. Take your photography to new heights with our cutting-edge drones. Elevate your perspective today!

BRUSHLESS GIMBALS.
Unlock smooth and stabilized footage with our UAS brushless gimbals and BGC motors. Engineered for precision and reliability, our gimbals ensure silky-smooth camera movements, capturing every moment with unparalleled clarity. Paired with our high-performance BGC motors, our gimbals deliver unrivaled stability and control, empowering you to create professional-grade aerial videos and photography. Elevate your UAS experience with our industry-leading gimbal solutions today.

FPV Products & Parts.
Experience the thrill of flight like never before with our FPV products and parts. From cutting-edge digital and analog video transmission systems to high-performance goggles and ground stations, we've got everything you need to immerse yourself in the world of FPV racing and aerial exploration. Elevate your FPV game with our top-of-the-line equipment and unleash the adrenaline of real-time aerial adventures. Get ready to soar.

BGC Gimbal designing
Let us take your gimbal project to new heights! Our expertise lies in designing and building gimbals, including providing BGC parts and motors. We offer versatile gimbal solutions tailored for aircraft, fixed-wing, handheld devices, cable cams, and rotary craft. Our gimbals have proven effective in various applications, from ships and cars to helicopters and fixed-wing aircraft. Count on us to stabilize your image capture, even in dynamic, on-the-move scenarios. Elevate your imaging capabilities with our reliable gimbal solutions.

CNC services
Explore the possibilities with our comprehensive design, 3D printing, and CNC services tailored to your project needs. Specializing in carbon fiber and aluminum, we provide expert support every step of the way. From material selection guidance to refining designs for efficient mass production, we ensure your vision becomes reality with precision and excellence. Let us bring your ideas to life with our trusted expertise and unwavering commitment to quality.

UAS design manufacturing
At our core, we excel in drone UAS design and manufacturing, custom-tailored to meet your unique specifications. Whether it's payload capacity, flight time optimization, flight sealing for harsh conditions, or extending flight range, we're here to bring your vision to life. With expertise in coaxial propulsion and large multirotor craft, we specialize in crafting solutions that push the boundaries of possibility. Additionally, we offer component-level BGC and servo motors to further enhance your drone's performance and reliability. Let's collaborate to create the perfect UAS solution for your needs.
Customizing Robots. quadruped, humanoid, and AI integration.
We provide comprehensive services for customizing robots, including quadruped, humanoid, and AI integration. From upgrading parts and controllers to enhancing motors and incorporating advanced Lidar technology, we offer solutions tailored to your specific needs. Whether it's adding hands, arms, or other specialized components, we're here to bring your robotic vision to life with precision and expertise.
UAS operations. Data Collection.
Unlock the power of aerial intelligence with our UAS operations tailored for GIS, surveying, and LIDAR point cloud creation. From capturing high-resolution imagery for precise mapping to conducting photogrammetric data collection in agriculture, oil, and gas industries, we offer cutting-edge solutions to meet your needs. Our advanced UAS technology enables efficient data collection, analysis, and decision-making, empowering you to gain valuable insights and drive operational excellence. Elevate your aerial operations with our proven expertise and innovative solutions.

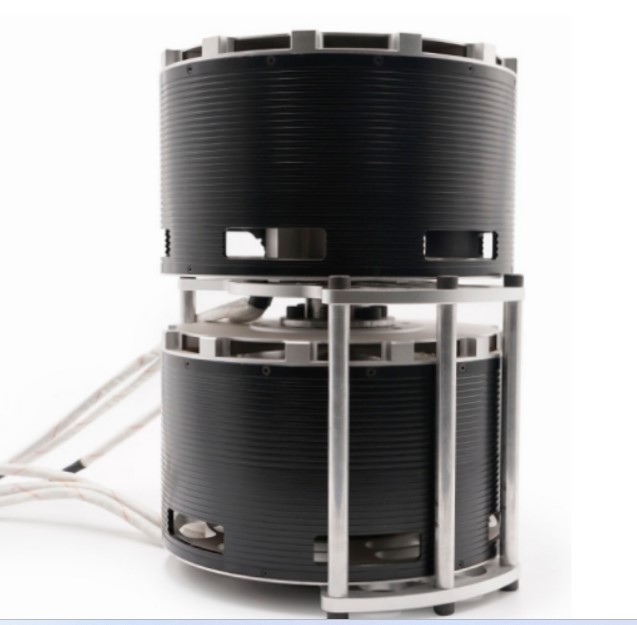
Coaxel Motor, Motor Genorator. Power System.
Experience the future of motor generator design with our innovative solutions tailored for hybrid power systems and dual coaxial motors. Our cutting-edge 100kW and 200kW brushless outrunner motors redefine performance benchmarks for drones, parasailing, and light aircraft. Packed with advanced technology including Halbach array, encoders, and temperature sensors, our motors ensure peak efficiency and redundancy in operation. Beyond aerospace, our motors find applications in wind machines, wind tunnels, and dyno fans, delivering unmatched reliability and performance. Join us in shaping the future of propulsion technology for a wide range of industries.
Hydrogen Fuel Cell. Hiybrid Power System.
Step into the future of sustainable energy with our cutting-edge hydrogen fuel cell solutions. From compact 2W units to robust 500kW systems, we design and manufacture fuel cells that power drones, light aircraft, and demanding power systems with unmatched efficiency. Our hybrid systems offer a perfect balance of lightweight design and unparalleled power, making them ideal for UAS and ground stations in remote areas. With our innovative fuel cell technology, you can elevate your operations while reducing your carbon footprint. Join us in revolutionizing power generation for a greener, more sustainable tomorrow.

Information Technolegey. Consultant.
Elevate your IT security with our comprehensive suite of services. From IT audits to inventory management, we ensure the integrity of your accounts and safeguard against threats. Our team actively monitors employee activities, reducing risks and ensuring compliance. With our expertise in E-commerce consultations and AI integration, we streamline operations and drive efficiency. Protect your data with our edge protection solutions, including VPN and PF Sense firewall configuration. Our email services offer end-to-end encryption, whether on the cloud or on-site, ensuring secure communication at all times. Partner with us to fortify your digital defenses and stay ahead of evolving cyber threats.
